Los investigadores del departamento de inteligencia artificial de Google son conscientes de que la IA puede hacer que muchos procesos sean más sostenibles. Pero hasta ahora faltaban datos cuantificables sobre en qué medida podían ayudar. Y es que los sistemas inteligentes robóticos pueden ser muy flexibles y utilizarse en tareas de lo más diversas… si se les entrena para hacerlo.
A modo de ejemplo, se pusieron manos a la obra con una de las formas más habituales de mejorar la sostenibilidad de cualquier empresa donde trabaja mucha gente en una oficina: el proceso de reciclar correctamente y contaminar lo menos posible con los residuos y materiales de desecho generados, lo que ayuda a reducir la huella de carbono de la organización.
En Google todo se hace «a lo grande», así que es normal que al resultado de esta investigación lo hayan llamado Aprendizaje robótico a gran escala: clasificación de residuos en oficinas con una flota de robots («RL at Scale»). Su idea ha sido comprobar con una auténtica flota de más de veinte brazos robóticos si en la práctica se pueden «enseñar» las tareas de separación para el reciclaje tan típicas de oficinas, restaurantes, hostelería y otros entornos reduciendo los errores y con ello la contaminación en el reciclaje. De hecho, han dedicado dos años completos en tres oficinas diferentes para tener datos contundentes, en un experimento que es de los más grandes realizados hasta la fecha.
Aprendizaje profundo aplicado a los robots

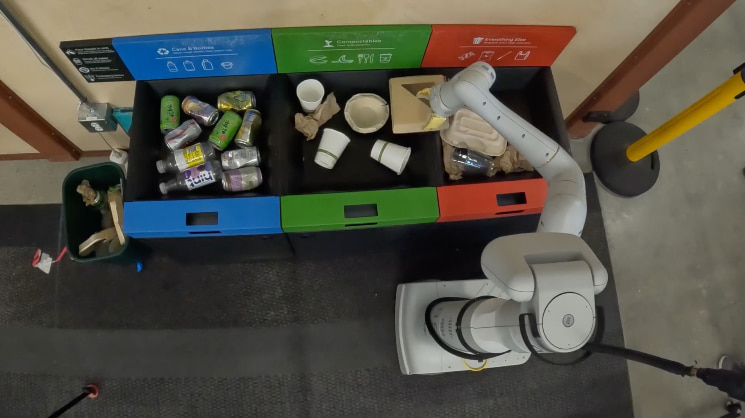
Para estas pruebas «en el mundo real» utilizaron unos brazos robóticos comerciales con 7 grados de libertad de movimiento, capaces de mover sus pinzas de forma ágil para agarrar los objetos, moverlos y soltarlos. Situados en las zonas de clasificación de basura, la idea era que sirvieran para separar los tres tipos de residuos:
- Materiales reciclables: latas y botellas.
- Compostables: contenedores de cartón y vasos de papel.
- Basura orgánica y general: la que acaba en los vertederos.
Si se tiene en cuenta que hay cientos, por no decir miles de objetos individuales distintos que pueden clasificarse, y lo complicado que es moverlos y agarrarlos debido a sus variadas formas y peso, no es tarea fácil para una máquina. Su visión además es muy limitada: una pequeña cámara de 640 × 512 píxeles y unos pocos colores. La «garra mecánica» envía una señal de retroalimentación sobre la posición exacta y la fuerza de agarre para que pueda detectarse si está sujetando el objeto correctamente.
 El trabajo mediante algoritmos de aprendizaje profundo por refuerzo (deep learning) consistió en hacerles trabajar en una especie de «escuela de robots» en estaciones fijas, donde aprendían por repetición cómo asir los objetos y depositarlos en las bandejas, así como cuáles eran las características de los distintos tipos de materiales y demás. En estas tareas, el refuerzo consiste en premiar con puntos las acciones bien realizadas y con negativos las mal realizadas. Esto requiere miles de repeticiones, pero todos los robots están aprendiendo a la vez, porque los datos del entrenamiento se comparten. En total realizaron unas 540.000 prácticas de este tipo en la «escuela robótica».
El trabajo mediante algoritmos de aprendizaje profundo por refuerzo (deep learning) consistió en hacerles trabajar en una especie de «escuela de robots» en estaciones fijas, donde aprendían por repetición cómo asir los objetos y depositarlos en las bandejas, así como cuáles eran las características de los distintos tipos de materiales y demás. En estas tareas, el refuerzo consiste en premiar con puntos las acciones bien realizadas y con negativos las mal realizadas. Esto requiere miles de repeticiones, pero todos los robots están aprendiendo a la vez, porque los datos del entrenamiento se comparten. En total realizaron unas 540.000 prácticas de este tipo en la «escuela robótica».
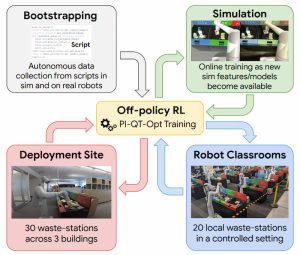 Parte del entrenamiento previo consistió también en incorporar simulaciones 3D. Ahí sólo interviene el software, no hay elementos físicos, y es la simulación física en 3D la que hace que el robot aprenda sobre la geometría de los objetos, las formas de sujetarlos y algunos trucos. Esta idea es la misma que se utiliza en el entrenamiento de otros robots, coches autónomos y sistemas industriales con capacidades similares; es mucho más rápido en tiempo, puede estar funcionando 24 horas y cuanta más potencia de cálculo se utilice más rápido se realizan las simulaciones y se completa el entrenamiento. Pero claro, eso no reemplaza al «mundo real».
Parte del entrenamiento previo consistió también en incorporar simulaciones 3D. Ahí sólo interviene el software, no hay elementos físicos, y es la simulación física en 3D la que hace que el robot aprenda sobre la geometría de los objetos, las formas de sujetarlos y algunos trucos. Esta idea es la misma que se utiliza en el entrenamiento de otros robots, coches autónomos y sistemas industriales con capacidades similares; es mucho más rápido en tiempo, puede estar funcionando 24 horas y cuanta más potencia de cálculo se utilice más rápido se realizan las simulaciones y se completa el entrenamiento. Pero claro, eso no reemplaza al «mundo real».
Cuando hay que enfrentarse a los residuos del mundo real
Cuando las máquinas físicas pasaron a actuar en su entorno de entrenamiento real y, tras completar unas 32.500 tareas reclasificando los residuos depositados por las personas que trabajaban en las oficinas, se calculó que su precisión al clasificar los residuos fue de un 84 por ciento. Esto significó reducir la contaminación de los contenedores de basura debido a errores entre un 40 y 50% por ciento. Teniendo en cuenta que la sostenibilidad es un gran reto para cualquier empresa, toda cifra positiva y de mejora es buena.
Aunque los datos del experimento son satisfactorios, se podría decir que el tiempo de entrenamiento es demasiado largo y poco práctico, especialmente si se cambia la tarea y se elige una nueva, por ejemplo clasificar cajas en un almacén, reponer productos en una tienda o algo más directamente relacionado con el compromiso energético y de reducción del carbono. Los ingenieros de Google creen que una de las formas de mejorar esos tiempos sería incorporar más fuentes de datos: vídeos extraídos de internet, más simulaciones 3D y algunas otros conjuntos de datos que puedan ser válidos. Al fin y al cabo, «lo que aprende uno lo aprenden todos». Con esto los robots podrían aprender más rápido y ponerse en marcha en menos tiempo, adaptándose a muchos más entornos y situaciones.

Nos encantará conocer tu opinión, pero primero tenemos que indicarte que los comentarios están moderados, y no aparecerán inmediatamente en la página al ser enviados. Evita, por favor, las descalificaciones personales, los comentarios maleducados, los ataques directos o ridiculizaciones personales, o los calificativos insultantes de cualquier tipo, sean dirigidos a los autores, a cualquier otro comentarista o la empresa propietaria de esta página. Estás en tu perfecto derecho de comentar anónimamente, pero por favor, no utilices el anonimato para decirles a las personas cosas que no les dirías en caso de tenerlas delante. Intenta mantener un ambiente agradable en el que las personas puedan comentar sin temor a sentirse insultados o descalificados. No comentes de manera repetitiva sobre un mismo tema, y mucho menos con varias identidades o suplantando a otros comentaristas. También, procura que tus opiniones estén relacionadas con lo que se comenta en esta entrada. Los comentarios off-topic, promocionales, o que incumplan todas estas normas básicas serán eliminados.